Аэродромный радиопеленгатор DF-2020 в исполнении всепогодного бокса
Аэродромный радиопеленгатор DF-2020 в исполнении всепогодного бокса
Система автоматической посадки БЛА Dina Prim 7900 является гибридным решением, которое сочетает преимущества радиолокационной посадки (РСП) и оптической посадки (VBLS). Преимущества гибридной системы заключаются в следующем:

Посадочный радиолокатор 35 ГГц
Разработчиком и поставщиком РСП является НИИИТ РК, ведущий разработчик корабельных средств радионавигации и посадки палубных самолетов. Компания Primaria является разработчиком оптической подсистемы VBLS, а также представляет совместное интегрированное решение под маркой Dina Prim 7900.
В системе автоматической посадки БЛА используется трехкоординатный моноимпульсный следящий радиолокатор миллиметрового диапазона, работающий в диапазоне частот 34 — 36 ГГц. Радиолокатор может работать как в пассивном режиме, который использует ЭПР БЛА, которая обеспечивает отражение от цели, так и в активном режиме, при размещении ответчика на борту БЛА. Максимальная дальность действия в пассивном/активном режиме составляет 10 км/15 км, минимальная дальность — 100 м/50 м соответственно. Значения дальности приведены для ЭПР БЛА равной 2 кв.м.

Для бортового оборудования гибридной системы автоматической посадки MLS + VBLS базовой платформой является посадочный автопилот «DinaPrim 2700», разработанный ООО «Примариа». Структура посадочного автопилота с дополнительным сенсором — приемником MLS показана на блок — диаграмме. Структура показывает основные компоненты посадочного автопилота, который в конечном счете выдает команды управления на основной автопилот БПЛА. Посадочный автопилот может также самостоятельно управлять исполнительными сервоприводами БПЛА. Читать далее
По имеющимся данным, c 2001 года армия США потеряла более 400 больших дронов. Помимо стоимости самого БПЛА (беспилотного летательного аппарата), ряд аварий повлекли за собой повреждения другой военной техники, зданий и сооружений, что значительно увеличило цену потерь.
Помимо боевых потерь, существенные причины аварий составляют ошибки пилотов и ненадежность канала передачи данных. Ситуацию усугубляет то, что в управлении БПЛА, в отличие от пилотируемых летательных аппаратов, появляется новый принципиальный фактор: влияние ветра. В условиях турбулентности оператору недостает скорости реакции для того, чтобы создать необходимые управляющие воздействия, что ведет к аварии.
Все информационные источники указывают, что человеческий фактор является «слабым звеном» на этапе посадки, и это звено необходимо исключить.
На этом фоне становятся очевидными преимущества автоматической посадки БПЛА, которые можно сформулировать таким образом: Читать далее
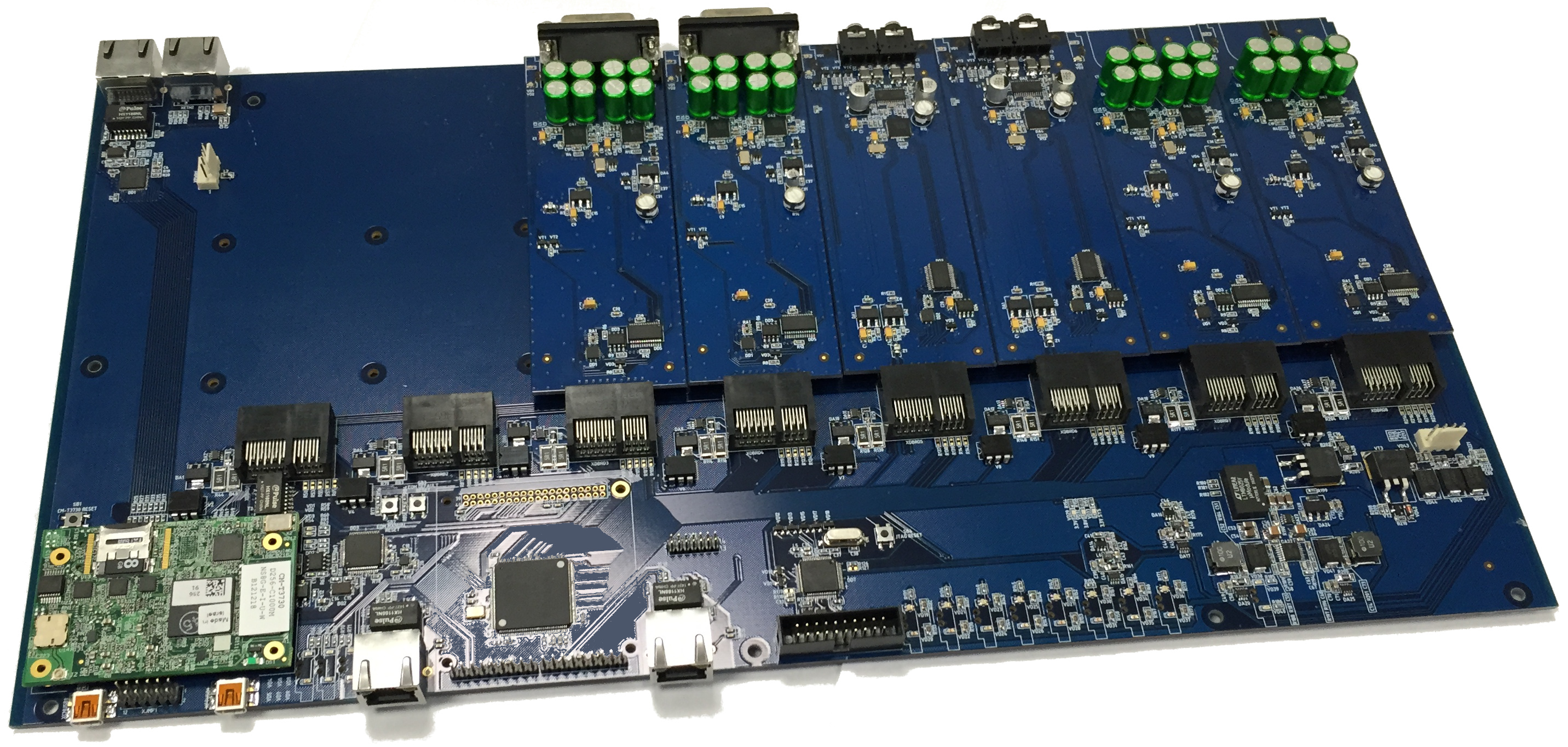
SIP/VoIP шлюз образован несущей платой с цифровой шиной, на которой установлены врубные интерфейсные модули (начиная с правого верхнего угла). На фото показано 6 установленных модулей и еще два свободных места для установки слева. Интерфейсные модули заканчиваются разъемами для подключения внешних аудио — устройств. В левом нижнем углу расположен встраиваемый ARM/DSP компьютерный модуль.
Шлюз предназначен для обеспечения функций цифровой передачи речи “Voice over IP” (далее VoIP) и коммутации медиапотоков по протоколу SIP в системе речевой связи авиадиспетчер — пилот, согласно требований стандарта ED-136 и ED-137А/В EUROCAE.
Основным направлением компании является пассивная когерентная локация (Passive Coherent Location). Компанией разработан прототип пассивного радиолокатора Prim Ceramic 2700. Пассивный радар использует компоненты с высокой составляющей интеллектуальной собственности, которая основывается на исследованиях в области обработки сигналов когерентной пассивной локации и близких им радиопеленгационных сигналов.
Команда Primaria берет свое начало с 1980-х годов и с этого времени профессионально специализируется на разработке аэродромных радиопеленгаторов (АРП), с фокусом на программно-аппаратные средства обработки пеленгационных сигналов. Начиная с 2013 года, Primaria ведет основной проект компании — разработку когерентного пассивного радара Prim Ceramic 2700.
Заказчику нужно модернизировать радиолокатор? Разработать новый? Создать радиопеленгационную систему или малогабаритную медийную cистему?
Если вы специалисты в системных решениях и получили крупный проект, не тратьте время на специализированные узлы. Сосредоточьтесь на бизнесе, взаимоотношениях с заказчиком, самом проекте и архитектуре изделия. В проекте, связанном с обработкой радиоданных, вам скорее всего понадобятся:
Что такое case study? Это описание выполненного успешного проекта, только не формальное, понятное только одним исполнителям, а сделанное таким образом чтобы по этому описанию можно было воспроизвести работающую систему. Case study это практически лабораторная работа, провести которую можно сразу воссоздать работающее устройство и начиная с этого уровня, вносить изменения и модернизировать его под свои требования.